Цель работы: Усвоить общие сведения по рулевому управлению колесных тракторов и автомобилей, сведения по установке управляемых колес. Изучить рулевое управление автомобиля ГАЗ-53-12, трактора МТЗ-80, автомобиля КамАЗ. Выявить основные возможные неисправности приведенных конструкций рулевого управления.
Общие сведения. Рулевое управление предназначено для изменения и поддержания направления движения трактора или автомобиля по требуемой траектории.
Наибольшее распространение получили две схемы рулевого управления: поворотом передних колес относительно переднего моста (рис. 1, а) или полурам вместе с мостами и колесами относительно шарнира, соединяющего эти полурамы (рис. 2,6). Первая схема применена на всех автомобилях и универсально-пропашных тракторах, вторая — на колесных тракторах общего назначения с четырьмя ведущими колесами одинакового размера.
Основное условие поворота — качение направляющих колес без бокового скольжения. Для выполнения этого условия необходимо, чтобы геометрические оси всех колес пересекались в мгновенном центре вращения — точке О, называемой Центром поворота. Расстояние OO1 от центра поворота до середины заднего моста называют Радиусом поворота R.
Геометрические оси всех колес пересекутся в одной точке в том случае, если передние управляемые колеса при повороте будут поворачиваться на разные углы: внутреннее колесо на больший угол, наружное на меньший. Соблюдение этого условия достигается применением в конструкции рулевого управления четырехзвенного шарнирного механизма — Рулевой трапеции.
Рулевая трапеция состоит из передней оси, рулевых рычагов 3 (рис. 1, в), закрепленных на шкворнях 2 поворотных кулаков, и поперечной тяги 4, шарнирно соединенной с рычагами 3. Рулевая трапеция приводится в движение водителем через продольную тягу 6.
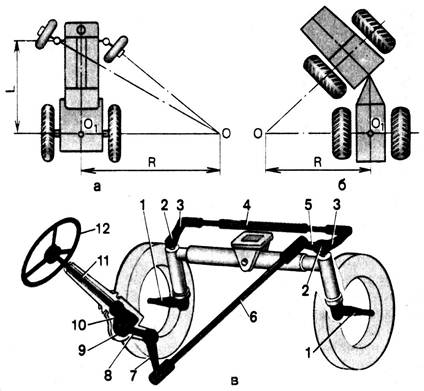
Рис.1 – Схемы поворота и рулевое управление колесных тракторов:
А – четырехколесного универсального трактора; б – трактора общего назначения с четырьмя ведущими колесами; в – рулевое управление; 1 – цапфы; 2 – шкворни; 3 – рулевые рычаги; 4 – поперечная тяга; 5 – поворотный рычаг; 6 – продольная тяга; 7 – рулевая сошка; 8 – вал рулевой сошки; 9 – сектор; 10 – червяк; 11 – рулевой вал; 12 – рулевое колесо.
Предотвращение пробуксовывания ведущих колес при повороте достигается установкой дифференциала в ведущем мосту.
Рулевое управление тракторов и автомобилей с передними управляемыми колесами состоит из рулевого колеса 12 с валом 11, рулевого механизма, включающего в себя в данном случае червяк 10, сектор 9 и вал 8 с рулевой сошкой 7, и рулевого привода, состоящего из продольной тяги 6 и рулевой трапеции.
Рулевой механизм преобразует вращательное движение рулевого колеса в ограниченный поворот рулевой сошки. Для удобства управления передаточное число рулевого механизма выбирают с таким расчетом, чтобы отклонение управляемых колес от нейтрального положения на максимальный угол 35.. .40° происходило за 1,25…2,0 оборота рулевого колеса в каждую сторону. Передаточное число рулевого механизма у многих тракторов и автомобилей составляет 15…25.
Чем больше это передаточное число, тем меньшее окружное усилие требуется для поворота, меньше угол отклонения управляемых колес за один оборот рулевого колеса и больше время поворота. Последнее существенно влияет на безопасность дорожного движения.
Если максимально возможное передаточное число рулевого механизма не обеспечивает требуемой легкости управления, применяют усилители. Наибольшее распространение получили гидравлические усилители рулевого механизма. В качестве рулевых механизмов используют следующие передачи: Цилиндрический червяк 1 (рис. 2, а) — Сектор 2 (тракторы К-701, Т-150К, МТЗ-80, автомобиль Урал-375Д); Глобоидальный червяк 1 (рис. 2, б) — ролик 2 (автомобили ГАЗ-53-12, ГАЗ-66, «Волга», «Жигули», «Москвич»); Винт 1 (рис. 2, в) — Гайка 2 и Рейка 3 — Зубчатый сектор 4 (автомобили КамАЗ, ЗИЛ-130, БелАЗ-540, КрАЗ-255Б); Конические зубчатые колеса (самоходные шасси Т-16М); Зубчатое колесо — зубчатая рейка (автомобиль ВАЗ-2108).

Рис. 2 – Схемы рулевых механизмов:
А – цилиндрический червяк; 1 – сектор 2; б – глобоидальный червяк 1 – ролик 2; в – комбинированная: 1 – винт; 2 – гайка; 3 – рейка; 4 – сектор; 5 – шарик.
По взаимному расположению рулевого колеса и рулевого механизма различают рулевые управления с Совмещенным, или Разделенным рулевым колесом и рулевым механизмом. При совмещенном рулевом управлении (см. рис. 1, в) рулевой вал 11 непосредственно соединен с ведущим элементом рулевого механизма — червяком 10, а при разделенном — рулевой вал соединен с рулевым механизмом через карданную передачу и ось рулевого вала не совпадает с осью вращения червяка или винта, как, например, у автомобиля ЗИЛ-130, трактора МТЗ-80 и др. При разделенном управлении рулевое колесо можно устанавливать в наиболее удобном для водителя месте.
По месту расположения рулевой трапеции относительно управляемого моста различают рулевые приводы с Передним и Задним расположением трапеции. Рулевое управление с передним расположением трапеции показано на рисунке 1,в.
По конструкции поперечной тяги рулевые трапеции могут быть Цельными или Расчлененными. Цельная трапеция имеет одну поперечную тягу 4, как показано на рисунке 1,в, а расчлененная состоит из двух поперечных тяг, шарнирно соединенных с рулевым рычагом или сошкой. Расчлененные трапеции применяют на автомобилях с независимой передней подвеской, а также на тракторе МТЗ-80.
Помимо механических рулевых управлений без усилителей и с гидро — и пневмоусилителями может быть использовано гидрообъемное рулевое управление (ГОРУ), у которого рулевое колесо с рулевым валом не имеет механической связи с рулевой трапецией. ГОРУ применяют на тракторе МТЗ-100 и комбайнах.
Колесные тракторы общего назначения (Т-150К, К-701) со всеми ведущими, одинаковыми по размерам колесами поворачиваются в результате углового смещения полурам гидроцилиндрами, которые являются исполнительными механизмами рулевого управления.
Установка управляемых колес. Правильная установка управляемых колес обеспечивает курсовую устойчивость движения тракторов и автомобилей, легкость поворота, качение колес с меньшей затратой мощности и минимальным износом шин. Под стабилизацией управляемых колес понимают их способность сохранять прямолинейное движение и автоматически возвращаться в исходное положение после поворота. Стабилизацию колес достигают с помощью поперечного и продольного наклонов шкворней.
Поперечный наклон шкворня определяется углом ![]() (рис. 3, а), который составляет 6…10°. При поперечном наклоне шкворней поворот колес сопровождается некоторым подъемом переднего моста, что способствует возвращению колес в положение, соответствующее прямолинейному движению.
(рис. 3, а), который составляет 6…10°. При поперечном наклоне шкворней поворот колес сопровождается некоторым подъемом переднего моста, что способствует возвращению колес в положение, соответствующее прямолинейному движению.
Продольный наклон шкворня верхним концом назад определяется углом ![]() (рис. 3, б), который составляет 1,0…3,5°. При повороте возникает центробежная сила, которая через ступицы, колеса и шины передается на дорогу и вызывает со стороны дороги боковые реакции на колеса. Эти реакции приложены в области контакта колес с дорогой. При продольном наклоне шкворней возникает стабилизирующий момент от действия этих сил и реакций, который стремится вернуть управляемые колеса в положение прямолинейного движения.
(рис. 3, б), который составляет 1,0…3,5°. При повороте возникает центробежная сила, которая через ступицы, колеса и шины передается на дорогу и вызывает со стороны дороги боковые реакции на колеса. Эти реакции приложены в области контакта колес с дорогой. При продольном наклоне шкворней возникает стабилизирующий момент от действия этих сил и реакций, который стремится вернуть управляемые колеса в положение прямолинейного движения.
Углы наклонов шкворней определяются конструкцией переднего моста и рулевого управления и в процессе эксплуатации не регулируются.
Для облегчения управления колеса устанавливают под некоторыми углами.
Развал колес под углом ![]() (рис. 3, а), который задают не более 2°, способствует появлению силы, направленной вдоль оси колеса и постоянно прижимающей его к внутреннему подшипнику ступицы. Это предотвращает перемещение и раскачивание колеса вдоль своей оси и улучшает устойчивость движения.
(рис. 3, а), который задают не более 2°, способствует появлению силы, направленной вдоль оси колеса и постоянно прижимающей его к внутреннему подшипнику ступицы. Это предотвращает перемещение и раскачивание колеса вдоль своей оси и улучшает устойчивость движения.
Совместно с поперечным наклоном шкворней развал колес уменьшает плечо обката — расстояние х между средней плоскостью колеса и точкой пересечения оси шкворня с поверхностью дороги. Благодаря этому уменьшается усилие для поворота колеса относительно шкворня, что облегчает управление трактором или автомобилем. Развал под большим углом резко увеличивает износ шин.

Рис. 3 – Установка направляющих колес:
А – развал колес и поперечный наклон шкворней; 1 – остов трактора; 2 – выдвижные трубы кулаков; 3 – передняя ось; 4 – шкворень; б – продольный наклон шкворней; в – схождение колес: 1 – наконечник; 2 – контрагайка; 3 – труба поперечной тяги; 4 – сошка; 5 – ось; 6 – поворотный рычаг.
Схождение колес определяют как разность расстояний между боковинами шин в средней их части сзади по ходу трактора или автомобиля (расстояние L2 на рис. 3,в) и спереди (расстояние L1). Схождение колес задают в пределах 2…12 мм регулировкой длины поперечной тяги как допуск на зазоры, которые при качении выбираются и схождение уменьшается до нуля.
Рулевое управление автомобиля ГАЗ-53-12 состоит из рулевой колонки, рулевого механизма и привода. Рулевое управление совмещенное, т. е. вал 20 (рис. 4, а) непосредственно соединен с червяком 12.
Рулевой механизм состоит из глобоидального червяка 12 и трехгребневого ролика 13. Картер 2 рулевого механизма закреплен на левой продольной балке рамы болтами.
Червяк 12, напрессованный на пустотелый рулевой вал 20, установлен в картере на двух конических роликовых подшипниках 6 и 15. Наружные обоймы подшипников запрессованы в расточках картера и удерживаются крышками 7 и 16. Под крышку 7 установлено несколько прокладок 11 для регулировки подшипников червяка. Выходы валов червяка и сошки уплотнены сальниками 10 и 18.

Рис. 4 Рулевой механизм и шарнирные устройства автомобиля ГАЗ-53-12:
А – рулевой механизм: 1 – рулевая сошка; 2 – картер; 3 – вал сошки; 4, 10 и 18 – сальники; 5 – втулка; 6 и 15 – подшипники червяка; 7 – нижняя крышка картера; 8 и 19 – пружины сальника; 9 – труба электропоровода; 11 – регулировочные прокладки; 12 – глобоидальный червяк; 13 – трехгребневой ролик; 14 – пробка маслозаливного отверстия; 16 – верхняя крышка картера; 17 – стяжной хомут; 20 – рулевой вал; 21 – колонка руля; 22 – боковая крышка; 23 – подшипник вала сошки; 24 – стопорная шайба; 25 – контрагайка; 26 – регулировочный винт; б – шарнирные устройства: 1 – масленка; 2 – пята; 3 – коническая пружина; 4 – крышка; 5 – стопорное кольцо; 6 и 15 – наконечникик; 7 – труба продольной тяги; 8 – резиновое кольцо; 9 – обойма; 10 – резиновый колпак; 11 – кольцо; 12 – палец; 13 – сухарь; 14 – сменный вкладыш; 16 – хомут; 17 – труба поперечной тяги.
Трехгребневой ролик 13 посажен на ось с помощью двух шарикоподшипников. Ось ролика установлена в щеках головки вала 3 сошки и концы оси расклепаны. Между торцами ролика и щеками размещены упорные шайбы. Вал 3 поворачивается в двух подшипниках: бронзовой втулке 5 и роликовом подшипнике 23. На мелкие конические шлицы вала посажена сошка 1. Правильность установки сошки обеспечивается четырьмя сдвоенными шлицами. Зазор в зацеплении червяк — ролик регулируют с помощью винта 26, ввернутого в боковую крышку 22 картера. Винт фиксируется стопорной шайбой 24, штифтом и гайкой 25.
Рулевой привод имеет заднее расположение цельной трапеции. Его продольная тяга шарнирно соединена задним концом с рулевой сошкой 1, а передним концом через рычаг левого поворотного кулака — с рулевой трапецией. Рычаги рулевой трапеции жестко соединены с правым и левым поворотными кулаками, а между собой — шарнирно через поперечную тягу.
Продольная и поперечная тяги с помощью шарнирных устройств соединены с рычагами. К трубе 7 (рис. 4, б) продольной тяги приварены наконечники 6, в которые установлены сменные вкладыши 14, сухарь 13 и полусферический палец 12, опирающийся на пяту 2. Пята поджата к пальцу конической пружиной 3, которая упирается в крышку 4, закрепляемую стопорным кольцом 5. На палец шарнира с небольшим натягом надет резиновый колпак 10, закрепленный обоймой 9 на наконечнике. Пружинное стальное кольцо 11 обеспечивает уплотнение колпака. Смазывают шарнир через масленку 1.
С поперечной рулевой тягой правой и левой резьбой соединены наконечники 15. Продольные разрезы в трубе 17 этой тяги стянуты хомутами 16.
Рулевое управление трактора МТЗ-80 разделенное, с гидроусилителем и задним расположением расчлененной рулевой трапеции. Привод рулевого механизма служит для изменения положения рулевого колеса и передачи вращения от него к рулевому механизму.
Труба 6 (рис. 5, а) рулевой колонки приварена к серьге 7, которая шарнирно соединена со стойкой 9 двумя винтами 15. Благодаря этому рулевую колонку можно поворачивать относительно стойки 9 и тем самым изменять угол наклона рулевого колеса (рис. 5, б). В рабочем положении I рулевая колонка удерживается фиксатором 17 (рис. 5, а). Для поворота колонки рукоятку 19 подают вверх, и фиксатор выходит из паза правой стенки 16 стойки 9. После этого колонку можно легко повернуть вперед. В этом положении II колонка не фиксируется. У тракторов МТЗ-100, МТЗ-102 предусмотрена фиксация колонки в четырех положениях через угол 5°.
Рулевое колесо 1 закреплено на шлицах полого рулевого вала 3, внутри которого проходит винт 4, соединенный с маховичком 2. Винт вворачивается в гайку 20, в которую запрессован штифт 21, фиксирующий ее от проворачивания в промежуточном вале 5. На гайке 20 и вале 3 выполнены скосы, которые при вворачивании винта 4 расклинивают и прижимают гайку и вал к внутренним стенкам промежуточного вала 5. Этим устройством можно регулировать положение рулевого колеса по высоте в пределах ±120 мм (рис. 5,б).
Промежуточный вал 5 (рис. 5,а) вращается в капроновых втулках 22, которые установлены в резиновые амортизаторы 23 для уменьшения вибрации вала.
Вращение от рулевого колеса передается на вал 3, затем через гайку 20 и штифт 21 на промежуточный вал 5 и далее через карданный шарнир 12, вал 13 — на шлицевую втулку 14, которую устанавливают на шлицы червяка рулевого механизма.
Рулевой механизм смонтирован в одном корпусе 22 (рис. 6) с гидроусилителем. В качестве рулевого механизма использована передача цилиндрический червяк 4 — сектор 7. Двухвенцовый сектор одновременно находится в зацеплении с червяком и рейкой 9, соединенной со штоком 25 гидроцилиндра.
Червяк вращается в двух шариковых подшипниках, наружные обоймы которых установлены в эксцентричной втулке 6 с небольшим зазором, что позволяет ему вместе с золотником 31 перемещаться в осевом направлении (вперед и назад).
Сектор 7 установлен на шлицах поворотного вала 21 и закреплен гайкой 8. Поворотный вал 21 вращается в двух втулках корпуса 22 и в верхней крышке 12. На нижнем шлицевом конце поворотного вала установлена сошка 18, закрепляемая гайкой 19.
Рулевая трапеция включает в себя две поперечные рулевые тяги, шарнирно соединенные с сошкой 4 (см. рис. 3, в), два поворотных рычага 6 и переднюю ось. Каждая рулевая тяга состоит из соединительной трубы 3 и двух наконечников 1 с правой и левой резьбой. Наконечники ввернуты в резьбовые отверстия трубы 3 и закреплены контргайками 2. Внутри наконечника размещено шарнирное устройство, состоящее из шарового пальца, резинового и капронового вкладышей, закрытых резиновым чехлом и регулировочной пробкой.

Рис. 5 Привод рулевого механизма трактора МТЗ-80:
А – конструкция привода: 1 – рулевое колесо; 2 – махавичок; 3 – рулевой вал; 4 и 15 – винты; 5 – промежуточный вал; 6 – труба рулевой колонки; 7 – серьга; 8 и 12 – карданные шарниры; 9 – стойка; 10 – средний вал; 11 – промежуточная опора; 13 – передний вал; 14 — шлицевая втулка; 16 – правая стенка стойки; 17 – фиксатор; 18 – пружина; 19 – рукоятка; 20 и 24 – гайка; 21 – штифт; 22 – втулка; 23 – амортизатор; 25 – контрагайка; б – различные положения рулевого колеса; I и II – положения рулевой колонки.

Рис. 6 — Гидроусилитель рулевого управления трактора МТЗ-80: 1 – пробка; 2 – клапанная крышка; 3 – регулировочный винт предохранительного клапана; 4 – червяк; 5 – болт регулировочной втулки; 6 – регулировочная эксцентричная втулка; 7 – сектор; 8, 19 и 30 –гайки; 9 – рейка; 10 – маслопровод для смазывания верхней опоры; 11 – регулировочный винт; 12 – верхняя крышка; 13 – фильтр; 14 – редукционный клапан; 15 – кран управления; 16 – золотник датчика; 17 – маховичок крана; 18 – сошка; 20 – сливная пробка; 21 – поворотный вал; 22 – корпус; 23 – упор рейки; 24 – регулировочные прокладки; 25 шток; 26 – поршень; 27 – передняя крышка цилиндра; 28 – упорный подшипник; 29 – крышка; 31 – золотник.
Рулевое управление автомобилей КамАЗ разделенное, с гидроусилителем и цельной рулевой трапецией. Рулевое управление состоит из рулевого колеса 1 (рис. 7), рулевой колонки 2, карданной передачи в, углового редуктора 9, рулевого механизма 10, вала 13, сошки 12, продольной рулевой тяги 11 и рулевой трапеции. Гидравлический усилитель состоит из распределителя 8, гидроцилиндра, размещенного в картере рулевого механизма 10, насоса 14 с бачком 15, радиатора 7, трубопроводов и шлангов.
Рулевая колонка, состоящая из трубы с размещенным в ней на двух шариковых подшипниках рулевым валом, прикреплена в верхней части панели кабины с помощью кронштейна 3, а в нижней части — к полу кабины с помощью фланца 4. Осевой зазор в подшипниках регулируют гайкой 5.
Карданная передача 6, включающая в себя вал, втулку и два карданных шарнира, передает вращение с рулевого вала на вал ведущего конического зубчатого колеса углового редуктора 9.

Рис. 7 – Рулевое управление автомобилей КамАЗ:
1 – рулевое колесо; 2 – колонка рулевого управления; 3 – кронштейн; 4 – фланец; 5 – регулировочная гайка; 6 – карданная передача; 7 – радиатор; 8 – распределитель; 9 – угловой редуктор; 10 – рулевой механизм; 11 – продольная рулевая тяга; 12 – сошка; 13 – вал сошки; 14 – насос; 15 – бачок.
Конический одноступенчатый угловой редуктор служит для передачи вращения от карданной передачи на винт рулевого механизма с передаточным отношением, равным единице. Собран редуктор в корпусе 33 (рис. 8), который шпильками прикреплен к картеру 23 рулевого механизма. Ведущее коническое зубчатое колесо изготовлено как одно целое с валом 7 и установлено в съемном корпусе 10 на шариковом 6 и игольчатом 8 подшипниках. Шариковый подшипник закреплен гайкой, игольчатый — стопорным кольцом.
Ведомое коническое зубчатое колесо 11 вращается в двух шарикоподшипниках 12, установленных в корпусе 33 редуктора. Шарикоподшипники посажены с натягом на хвостовик зубчатого колеса и закреплены гайкой 30 со стопорной шайбой 31. Осевые перемещения зубчатого колеса ограничены стопорным кольцом 32 и крышкой 14. Зацепление конических зубчатых колес регулируют изменением толщины прокладок 5.
Ведомое коническое зубчатое колесо углового редуктора соединено шлицами с винтом 26 и передает ему вращение от рулевого колеса; при этом винт может перемещаться в осевом направлении (вперед и назад).
Рулевой механизм собран в картере 23, который одновременно служит цилиндром гидроусилителя. В качестве рулевого механизма использована двойная передача: винт 26 — гайка 27 и рейка (поршень) 24 — сектор 18.
Для уменьшения сил трения винт 26 вращается в гайке 27 на шариках, размещенных в канавках винта и гайки с перекидной трубкой. Гайку, собранную с винтом и шариками, устанавливают в поршень-рейку 24 и фиксируют двумя установочными винтами 17.
Поршень-рейка размещен в картере 23, который служит ему цилиндром. Поршень имеет уплотнительное кольцо 16 и масляные канавки. Рейка входит в зацепление с зубчатым сектором 18 вала 19 сошки и поворачивает его в бронзовой втулке, запрессованной в картер рулевого механизма, и в алюминиевой боковой крышке 42.

Рис. 8 – Рулевой механизм автомобиля КамАЗ-5320:
1, 14, 22 и 42 – крышки; 2 – реактивный плунжер; 3 – корпус клапана управления; 4 и 36 – пружины; 5 – регулировочные прокладки; 6 и 12 – шарикоподшипники; 7 – ведущий вал с зубчатым колесом; 8 – игольчатый подшипник; 9 – уплотнительное устройство; 10 – корпус; 11 – ведомое зубчатое колесо; 13, 32 и 44 – стопорные кольца; 15 – упорное кольцо; 16 – уплотнительное кольцо; 17 и 26 – винты; 18 – сектор; 19 – вал сошки; 20 – перепускной клапан; 21 – колпачок; 23 – картер; 24 – поршень-рейка; 25 – пробка; 27, 30, 39 и 41 – гайки; 28 – желоб; 29 – шарик; 31 – стопорная шайба; 33 – корпус редуктора; 34 – упорный подшипник; 35 – плунжер; 37 – золотник; 38 – шайба; 40 – регулировочный винт; 43 – уплотнение; 45 – регулировочная шайба; 46 – упорная шайба
Толщина зубьев сектора и поршня-рейки выполнена переменной по длине, что позволяет изменять зазор в зацеплении перемещением вала сошки с зубчатым сектором с помощью регулировочного винта 40, который удерживает вал сошки от осевых перемещений влево через упорную шайбу 46, а вправо — через регулировочную шайбу 45 и стопорное кольцо 44. Осевого перемещения вала сошки 0,02…0,08 мм достигают подбором регулировочной шайбы 45 определенной толщины. Винт 40 стопорят гайкой 41.
На шлицевой конец вала 13 (см. рис. 7) установлена и застопорена болтами сошка 12, которая соединена с продольной тягой 11 рулевого привода. Продольная тяга шарнирным устройством соединена также с верхним рычагом левого поворотного кулака. Продольная тяга представляет собой цельнокованую деталь с нерегулируемыми шарнирными устройствами.
Рулевая трапеция состоит из поперечной рулевой тяги и двух рычагов поворотных кулаков. Рычаги установлены на сегментной шпонке в конических отверстиях поворотных кулаков и закреплены корончатыми гайками со шплинтами. Трубчатая поперечная тяга имеет резьбовые концы, на которые навинчены наконечники с шарнирными устройствами. Наконечники фиксируют болтами клеммового зажима. Шарнирное устройство обеих тяг состоит из шарового пальца, верхнего и нижнего вкладышей, пружины и крышки.
Понятие о системах автоматического вождения трактора. Одним из резервов повышения производительности труда и качества выполняемых механизированных работ при использовании машинно-тракторных агрегатов — внедрение систем автоматического вождения трактора.
Различают системы автоматического вождения трех типов: полуавтоматические, автоматические и программные.
Полуавтоматическая система позволяет вести машинно-тракторный агрегат по следу маркера без участия тракториста-машиниста. Тракторист-машинист необходим для первого прохода агрегата, осуществления разворотов и контроля за работой автоматических устройств, т. е. эта система значительно облегчает труд механизатора, повышает его производительность и улучшает качество выполняемых работ.
Автоматическая система вождения трактора не требует вмешательства тракториста-машиниста во время какого-либо цикла работы машинно-тракторного агрегата. К такой системе можно отнести вождение группы агрегатов одним трактористом-машинистом.
Более сложными являются Программные системы автоматического вождения тракторов без участия трактористов-машинистов с использованием мини-ЭВМ.
Устройство полуавтоматической системы вождения тракторов К-700, К-701 показано на рисунке 9. Вся система состоит из копирующего механизма и электрогидравлического исполнительного механизма. Копирующий механизм установлен на подъемном кронштейне 7, который с помощью гидроцилиндра 9 может занимать рабочее или транспортное положение.

Рис. 9 – Полуавтоматическая система вождения трактора К-701: 1 – башмак; 2 – стойка копира; 3 – выдвижной кронштейн; 4, 8 и 10 – тяги; 5 – передний кронштейн; 6 – обхват; 7 – подъемный кронштейн; 9 – гидроцилиндр
Башмак 1 копира подвешен шарнирно и может перемещаться в горизонтальной и вертикальной плоскостях при движении по следу маркера. Смещение башмака передается на контрольный элемент, который посылает электрический сигнал на магниты электрогидравлического исполнительного механизма, управляющие золотниками. При срабатывании электромагнита золотник перемещается и направляет масло от насоса в соответствующие полости гидроцилиндров механизма поворота трактора.
Основные возможные неисправности и техническое обслуживание. Основная неисправность рулевого управления колесных тракторов и автомобилей, возникающая при эксплуатации, повышенный свободный ход рулевого колеса. Причинами этого могут быть увеличение зазора в рулевых механизме и приводе, ослабление крепления картера рулевых механизма и сошки, шарнирных устройств и поворотных рычагов.
Допустимый свободный ход рулевого колеса в рулевых управлениях без гидроусилителей до 10°, с гидроусилителями до 25…30°.
Для устранения повышенного свободного хода рулевого колеса трактор или автомобиль устанавливают на горизонтальной площадке, а его направляющие колеса — в положение, соответствующее прямолинейному движению. При наличии гидроусилителя пускают двигатель. Резко поворачивая рулевое колесо в одну и другую сторону и осматривая все соединения рулевого привода, определяют наличие зазоров в соединениях и надежность крепления корпуса рулевого механизма, рулевой сошки и рычагов. При необходимости выполняют крепежные работы и устраняют зазоры в сочленениях.
Повышенные зазоры в шарнирных устройствах рулевых тяг устраняют ввертыванием в наконечник тяги регулировочной пробки (крышки) или заменяют изношенные вкладыши и шаровые пальцы. Если после выполнения этих операций свободный ход рулевого колеса остается больше допустимого, проверяют и регулируют зазор в подшипниках направляющих колес и рулевом механизме. В рулевом механизме типа глобоидальный червяк — ролик регулируют осевой зазор в подшипниках червяка и зазор между червяком и роликом. Для регулировки зазора в подшипниках червяка продольную рулевую тягу отсоединяют от сошки 1 (см. рис. 4, а) и, вращая рулевое колесо, выводят червяк 12 из зацепления с роликом 13. Покачивают рулевое колесо вместе с рулевым валом 20 в осевом направлении.
При наличии ощутимого перемещения необходимо отрегулировать зазоры в подшипниках. Для этого убирают часть регулировочных прокладок 11 из-под нижней крышки 7 картера. Правильность регулировки проверяют по значению усилия, необходимого для вращения рулевого колеса, которое должно быть не более 3…5 Н.
Вводят червяк в зацепление с роликом и устанавливают ролик против середины червяка. Покачивая сошку 1, определяют перемещение ее нижнего конца, которое не должно превышать 0,3 мм. Для регулировки отворачивают контргайку 25 и, вращая регулировочный винт 26, доводят усилие для поворота рулевого колеса до 16…22 И. При этом перемещение нижнего конца сошки, определяемое по индикатору, должно быть не более 0,3 мм.
В рулевом механизме типа цилиндрический червяк — сектор регулируют зазор в зацеплении червяк — сектор и подтягивают гайку крепления червяка. Чтобы отрегулировать зазор, отсоединяют от сошки рулевые тяги, ослабляют болт 5 (см. рис. 6) крепления регулировочной эксцентричной втулки 6 и поворачивают ее по ходу часовой стрелки до упора червяка в зубья сектора. При работающем двигателе вращают рулевое колесо и поворотом регулировочной втулки против хода часовой стрелки добиваются исчезновения заедания рулевого колеса при его повороте от одного крайнего положения до другого. Усилие на рулевом колесе при этом не должно превышать 15…25 Н.
Ослабление затяжки специальной гайки 30 также приводит к увеличению свободного хода рулевого колеса, а иногда и к неустойчивому движению трактора. Перед затяжкой гайки закрепляют болтами распределитель, предварительно подложив под головки болтов шайбы, толщина которых равна толщине фланца крышки 29. Затягивают гайку 30 моментом 20 Нм и отворачивают ее на 1/2 … 1/10 оборота до совмещения отверстия в червяке с прорезью под шплинт в гайке. Убирают монтажные шайбы из-под болтов крепления распределителя, закрепляют его и устанавливают на место крышку.
В рулевом механизме типов винт — гайка и рейка — сектор (автомобили КамАЗ) проверку и регулировку проводят при отсоединенной продольной тяге и неработающем усилителе. Динамометром измеряют усилие на ободе рулевого колеса в различных положениях.
При повороте рулевого колеса от среднего положения более чем на два оборота усилие должно быть в пределах 6…16 Н, при повороте на ¾…1 оборот — не более 23 Н, при незначительном повороте — на 4…6 Н больше, чем во втором положении, но не более 28 Н. Регулировку начинают с третьего положения, устанавливая требуемые усилия смещением зубчатого сектора при вращении регулировочного винта в крышке рулевого механизма. При отклонении от указанных выше усилий в первом положении рулевого колеса подтягивают или ослабляют гайку крепления упорных подшипников винта при частичной разборке рулевого механизма.
Если усилия на ободе рулевого колеса во втором положении более 23 Н, то повреждены детали в паре винт — гайка.
Причинами ухудшения курсовой устойчивости трактора или автомобиля могут быть не только неисправность в рулевом управлении, но также и недостаточное или различное давление в шинах, зазор в подшипниках ступиц колес, неправильная установка управляемых колес, неисправности амортизаторов, неправильная балансировка колес.
Состояние рулевого управления влияет не только на работоспособность трактора и автомобиля, но в большей степени на безопасность работы на них.