Украина одна из крупнейших стран Европы по площадям, занятым под сады и виноградники. Многолетние насаждения являются одними из наиболее важных сельскохозяйственных культур, ценными диетическим и лечебными продуктами. Крым располагает исключительно благоприятными условиями для возделывания многолетних насаждений.
Основным резервом повышения эффективности производства плодов являются механизация наиболее трудоемких технологических операций возделывания этих культур, одной из которых является обработка почвы с одновременным уничтожением сорной растительности в междурядьях и в приствольной зоне многолетних насаждений.
В результате проведения защитных мероприятий против сорной растительности, а также своевременно проведя качественную обработку почвы между рядами приствольной и зоне, возможно в существенно повысить урожайность плантаций и получить качественную продукцию.
В настоящее время применяют несколько способов борьбы с сорной растительностью в приствольной зоне насаждений, это в основном механическое и химическое уничтожение сорняков.
Химический способ уничтожения сорняков с помощью гербицидов применяется при интенсивной технологии возделывания многолетних насаждений. При этой системе возделывания помимо новых технологических операций применяются так называемые уплотненные схемы посадок, когда расстояние между насаждениями уменьшается до 1…0,7 метра. При таких схемах посадки механический способ борьбы с сорной растительностью существующими для этого машинами не приемлем, так как ведет к значительным повреждениям корневой системы растений, а нередко даже и к их полному уничтожению.
Применение механического способа уничтожения сорной растительности при приствольной обработке сдерживается отсутствием необходимых для этого отечественных машин, отвечающих современным требованиям. Существующие виноградниковые культиваторы ПРВН – 2,5, ПРВМ – 3, ПРВМ – 4 с набором приспособлений для приствольной обработки не в состоянии качественно, без повреждения штамбов растений, проводить обработку.
Это обусловлено несовершенством рабочих органов этих машин, в первую очередь гидравлической системы управления этими органами
Разработке обоснований по усовершенствованию рабочих органов для приствольной обработки, в частности гидравлической системы их управления, посвящена данная работа.
У нас в стране и за рубежом ведутся исследования и разрабатываются конструкции машин для удаления сорной растительности в зоне расположения оснований растений садов и виноградников. Существующие машины работают по принципиально различным схемам. Ведется поиск более совершенных и надежных рабочих органов, а также изыскиваются возможности по повышению их работоспособности и межремонтного ресурса, с одной стороны, и снижение затрат энергии, расходуемой на выполнение технологического процесса с другой.
К конструкциям машин для приствольной обработки садов предъявляются следующие требования:
· машины должны выполнять технологический процесс на виноградниках с междурядьем 2,5 м и более;
· конструкция машин должна исключать возможность повреждать растения и их корневую систему более установленных норм;
· машина должна обеспечить: степень уничтожения сорной растительности в зоне расположения многолетнего растения не менее 95%, повреждение растений в виде частного сдира коры не более 1,0%, подрезание многолетних стволов корневой системы не допускается;
· машина должна отвечать требованиям техники безопасности и условиям гигиены труда для обслуживающего персонала.
При выполнении данной работы, в частности при разработке рабочих органов для межкустовой обработки и системы их управлением, необходимо учитывать эти требования.
Основной машиной, применяемой в Украине для обработки междурядий и приствольной зоны в садах, является машины ПРВН-2,5 и ПРВМ-3.
К этим машинам придаются комплекты приспособлений для внесения удобрений, нарезания поливных борозд, рыхления почвы между рядами, для приствольной обработки почвы в садах.
Приспособление ПРВМ-11000 применяют для обработки почвы между кустами в двух рядах виноградников с одновременной культивацией междурядий. Приспособление снабжено двумя плоскорежущими лапами 1 с механизмом поворота, смонтированном с обеих сторон на раме машины.
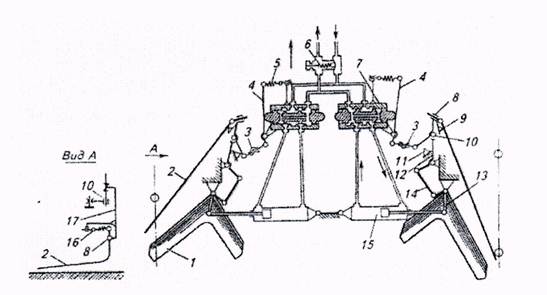
Во время работы щуп и лапа с каждой стороны движутся в ряду между кустами. Золотник гидрораспределителя занимает нейтральное положение, а гидроцилиндр удерживает лапу в рабочем положении.
Встретившись с кустом или шпалерным столбом, щуп поворачивается относительно шарнира, и через тягу рычаг переключает золотник на подачу масла в штоковую полость гидроцилиндра. Шток поворачивает кулак и выводит лапу из ряда. Одновременно кулак через систему обратной связи смещает шарнир щупа в сторону ряда, а тяга переводит золотник в нейтральное положение.
Обойдя препятствие, щуп под действием пружины возвращается в сторону ряда, переключает золотник на подачу масла в поршневую полость цилиндра. Шток поршня возвращает лапу в ряд. Щуп под действием тяги перемещается синхронно с лапой. Вхождение лапы в ряд прекратится после того, как поводок достигнет упора, который переведет золотник в нейтральное положение.
Приспособление ПРВМ-11000 удовлетворительно работает на подготовленных многолетних виноградниках с хорошо развитым и прямым штамбом или при условии наличия опорных колышков возле каждого куста.
Следует отметить, что вышеуказанное приспособление монтируется только на машины ПРВН-2,5 и ПРВМ-3, которых практически мизерное количество в виноградарских хозяйствах.
Поэтому специалистами различных хозяйств и предприятий, как Украины, так и стран ближнего зарубежья, разрабатываются и применяются на межкустовой обработке различные машины и приспособления к культиваторам.
Во многих хозяйствах юга Украины, в том числе и Крыма, на различные модификации культиваторов для виноградников устанавливают поворотные плоскорезные лапы с механизмом обхода штамбов растений. Привод этого механизма осуществляется при помощи силовых гидроцилиндров. Цилиндры управляются вручную трактористом из кабины при помощи гидравлических золотников установленного на тракторе гидрораспределителя. Это вызывает значительные неудобства для выполнения трактористом своих непосредственных обязанностей по безопасному и правильному управлению энергетическим средством, ведет к некачественной межкустовой обработке, а нередко и к значительным повреждениям или полному уничтожению растений.
Учеными нашего университета под руководством профессора Беренштейна Исаака Борисовича разработано устройство для обработки почвы приствольных кругов в интенсивных садах.
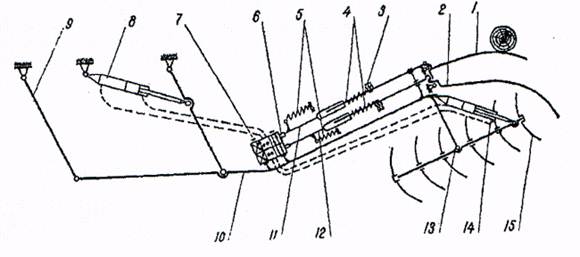
Устройство работает следующим образом: щуп, соприкасаясь со стволом дерева, перемещает тягой золотник гидрораспределителя. Золотник включает подачу масла в гидроцилиндры отвода секции 8 и поворота секции. При одновременной работе гидроцилиндров дисковая батарея перемещается в сторону междурядья, при этом она поворачивается вокруг вертикального шарнира, сохраняя заданный угол атаки на участке отвода секции. После обхода штамба щуп теряет контакт со стволом дерева, возвратные пружины устанавливают золотник в начальное положение, гидроцилиндр вводит секцию в межствольную полосу, при этом в контакт со стволом входит щуп, который золотником 6 включает гидроцилиндр поворота дисковой батареи, обеспечивая сохранение угла атаки на участке ввода секции в межствольную полосу. После потери щупом контакта со стволом дерева возвратные пружины устанавливают золотник в начальное положение, а гидроцилиндр фиксирует, заданный угол атаки в направлении скорости движения агрегата по междурядью.
Применение устройства для обработки почвы приствольных кругов позволяет уменьшить величину защитных зон вокруг штамба дерева, выравнивать поперечный профиль поверхности межствольных полос; при этом влага лучше сохраняется, уничтожаются и измельчаются сорные растения.
Приведенный выше анализ современных машин и приспособлений для приствольной обработки многолетних насаждений позволяет сделать вывод о том, что наиболее перспективными являются машины гидравлической автоматической системой управления рабочими органами.
В настоящее время в нашей стране не налажен серийный выпуск наиболее приемлемых гидравлических золотниковых устройств, позволяющих качественно с достаточной скоростью и точностью рабочими органами этих машин обходить многолетние насаждения при проведении приствольной обработки.
При проектировании гидравлических золотниковых устройств необходимо предусмотреть снижение нагрузки на гидравлическую систему энергетического средства в тот момент, когда рабочий орган машины производит обработку почвы в приствольной зоне или находится в отведенном состоянии.
В качестве наиболее приемлемого рабочего органа, проводящего обработку почвы и уничтожающего сорную растительность в приствольной зоне необходимо применять поворотный плоскорежущий нож.
Для уменьшения времени срабатывания системы управления особое внимание следует обратить на оптимизацию типоразмера исполнительного гидравлического цилиндра.
Учитывая вышеизложенное, целью настоящей работы является обоснование технологического процесса и основных конструктивных и кинематических параметров рабочих органов машины для межкустовой обработки виноградников, обеспечивающих повышение качества и снижение энергозатрат при выполнении данной технологической операции.
Задачи магистерской работы:
· Изучение условий работы машины для приствольной обработки садов в соответствии с агротехническими требованиями на проведение этой технологической операции.
· Обоснование схемы и параметров системы управления рабочими органами машины для приствольной обработки многолетних культур, обеспечивающей повышение качества и снижение энергоемкости выполнения технологического процесса.
· Теоретическое обоснование оптимальных геометрических и кинематических параметров гидравлического золотника системы управления рабочими органами.
· Теоретическое обоснование кинематической взаимной связи между рабочим органом и сигнальным щупом.
· Проведение многофакторного исследований характеристик экспериментальной системы управления рабочими органами, исследование воздействия ее на приствольную зону растений.
· Анализ зависимости между энергетическими и основными конструктивными параметрами гидравлического привода рабочими органами.
· Анализ влияния обратной связи в системе управления на качество работы рабочих органов.
Анализ литературных источников и технической документации показывает, что известен целый ряд исследований и технических решений по совершенствованию систем управления рабочими органами почвообрабатывающих машин для межкустовой обработки молодых посадок многолетних культур.
Все эти решения основаны на применении гидравлического привода в качестве систем слежения за штамбами растений и исполнительных механизмов для отвода рабочих органов от оси ряда для свободного прохождения этих штамбов.
Дальше читаешь по листам все что там написано кроме первого листа ватмана….
Лист 9 Предварительно определялись физико – механические параметры молодых растений: общую высоту растений, высоту расположения первого яруса ветвей, диаметр штамба растения на высоте 200 мм от поверхности почвы (высота прохождения щупа системы управления) и упругость древесины в месте замера диаметра штамба.
При этом было сделано допущение, что растение представляет собой балку круглого сечения, защемленную нижним концом.
Установлено, что на растениях всех исследованных сортов ветви первого яруса располагались на высоте, обеспечивающих необходимую зону контакта сигнального щупа с этими растениями.
Определена оптимальная высота расположения сигнального щупа от поверхности почвы, при котором величина отклонения штамба от основания растений не приводит к повреждению этих растений при межкустовой обработке: высота h = 0,2 м.
Определена зависимость допустимой нагрузки на штамб растения от диаметра этого штамба и высоты воздействия на него щупом. Зависимости определялись при наименьшем значении модуля упругости (по критерию допустимого изгиба штамба).
По полученным данным построен график зависимостей.
Определен допустимый момент сил на отвод сигнального щупа, при котором не травмируется кора молодых растений.
Технические решения и теоретические исследования положены в основу разработки экспериментальной машины для межкустовой обработки многолетних насаждений «ПРП – 2».
Это принципиально новая машина для обработки почвы в межкустовой зоне молодых садов и на плодоносящих виноградниках (рис.5.2).
Машина монтируется впереди трактора «Т-70» и имеет две выдвижные секции 1 для обработки почвы одновременно в двух приствольных полосах. Рабочим органом является поворотные ножи 2, унифицированные с ножами культиватора КСМ-5. Боковой вынос поворотных ножей в обе стороны от продольной оси трактора изменяется бесступенчато трактористом из кабины при помощи гидравлики в пределах от 1,5 до 3,0 м.
Машина «ПРП – 2» позволяет вести обработку полурядов в посадках многолетних насаждений с междурядьями от 3 до 6 м. В зависимости от ширины междурядья сзади трактора навешивается любая, имеющаяся в хозяйстве, машина. Для обработки самого междурядья: паровой культиватор, дисковая борона, чизель, культиватор и другие рабочие органы.
Автономность управления каждой секцией позволяет трактористу в процессе движения агрегата отвести в сторону междурядья любую из секций, если растение смещено от оси ряда или на пути движения секции имеется препятствие (оросительный гидрант, камень и т. д.).
Для управления поворотным ножом применена следящая гидромеханическая система, предложенная в данной работе. Незначительное усилие для отвода щупа позволило вести обработку молодого сада в год его посадки без установки защитных кольев.
Каждая выдвижная секция оборудована автономной гидравлической следящей (управляющей) системой. Для этого на валу отбора мощности трактора установлена гидростанция, оборудованная двумя независимыми насосами, и унифицированная со станцией обрезчика ветвей в саду «МКО-3».
Оптимальная скорость движения агрегата – 1,4…1,7 м/с, или движение трактора на первой или второй передачах при номинальном скоростном режиме работы двигателя. За смену агрегат обрабатывает 12…15 га. Сезонная нагрузка – около 100 га на один агрегат. Количество обработок может быть от 5 до 10 и более в зависимости от количества осадков, поливов и интенсивности роста сорняков.
По результатам проделанной научной и практической работы машина может быть рекомендована для окончательной конструкторской разработки и освоения в производстве.
Эффективность применения машины «ПРП – 2», рассчитанная на основании технических данных и результатов испытаний, приведена в таблице.
Данные таблицы показывают, что применение машины ПРП-2 заменяет тяжелый физический труд 10 человек.
Положительные результаты работы машины для межкустовой обработки многолетних насаждений достигнуты за счет применения на ней прототипа предлагаемой гидравлической системы управления рабочими органами. Проделанная работа показала, что одним из наиболее приемлемых способов приствольной обработки является механическое удаление сорной растительности.
Изучение и анализ конструкций зарубежных и отечественных систем управления рабочими органами различных почвообрабатывающих машин показал, что в качестве основного управляющего механизма в этих системах используются золотниковые гидравлические распределители. При работе этих распределителей не происходит разгрузка гидравлической системы трактора после срабатывания всей следящей системы, что в свою очередь ведет к перегреву рабочей жидкости (масла) и сбоям в работе всей управляющей системы.
Основываясь на работах отечественных ученых и специалистов коллективных хозяйств предложено применять в качестве управляющего механизма пластинчатые гидравлические распределители, которые не требуют меньших усилий на их срабатывание, чем золотниковые.
Предлагаемые распределители снабжены плоским золотником со специальными каналами, позволяющими сбрасывать давление рабочей жидкости в гидросистеме трактора после срабатывания системы управления.
Система управления дополнительно оборудована обратной связью между рабочими органами и следящими щупами, что позволяет отклонять эти рабочие органы от обрабатываемых штамбов растений на необходимую заданную величину.
В данной работе проведены теоретические исследования процесса работы пластинчатых гидравлических распределителей, необходимой скорости срабатывания предложено системы в зависимости от применяемых рабочих органов, допускаемых усилий на сигнальный щуп.
Экспериментальные исследования опытных образцов предлагаемой системы управления рабочими органами для приствольной обработки, установленные на культиваторе «ПРП — 2», показали положительные результаты и подтвердили правильность теоретических расчетов и перспективность выбранного направления работ.
Результаты проделанной работы могут быть использованы в качестве рекомендаций по разработке рабочих органов, в частности систем управления этими органами, при разработке новых и модернизации существующих машин для приствольной обработки многолетних насаждений.
Доклад окончен. Спасибо за внимание!