Системы автоматического регулирования в Mathcad
1. Изучение способов описания динамических свойств звеньев систем автоматического регулирования.
2. Получение дифференциальных уравнений, передаточных функций, переходных и частотных характеристик звеньев.
3. Расчетное построение переходных характеристик типовых динамических звеньев по их передаточным функциям для типовых воздействий.
1 Основные характеристики звеньев автоматических систем
При изображении систем управления применяются два принципа — функциональный и структурный и, соответственно, схемы подразделяются на функциональные и структурные.
Функциональной схемой называется такая схема, в которой каждому функциональному элементу системы соответствует определенное звено. Названия элементов и блоков указывают на выполняемые функции, например: чувствительный элемент, преобразующий элемент, датчик, управляющий блок, исполнительный блок, электродвигатель и т. д.
Структурной схемой называется такая схема, в которой каждой математической операции преобразования сигнала соответствует определенное звено. В зависимости от полноты математического описания и от математических операций, выполняемых различными звеньями, для объектов могут быть составлены различные структурные схемы.
Части структурной схемы называют Звеньями, каждое из которых отображает алгоритм преобразования сигнала — математическую или логическую операцию.
На структурных схемах звенья изображают прямоугольниками, внутри которых записывают соответствующие операторы преобразования сигналов. Прямоугольники соединяют линиями, отображающими информационные сигналы взаимодействия звеньев с указанием направлений этих сигналов (рис.1).
Рис.1. Звено системы автоматического регулирования.
Звено системы может являться техническим устройством любой физической природы, конструкции и назначения. Входная X(t) И выходная Y(t) величины соответствуют физическим величинам, выражающим воздействие предыдущего звена на данное звено и воздействие данного звена на последующее. Например, в электродвигателе роль величины X(t) будет играть напряжение в цепи питания якоря U(t), а Y(t) — угловая скорость вращения вала W(t) (рис.2).
Рис.2. Электродвигатель, как звено системы автоматического регулирования.
В зависимости от отображаемых физических свойств различают Статические и динамические элементарные звенья.
У Статического звена мгновенное значение выходного сигнала зависит только от мгновенного значения входного сигнала в данный момент и не зависит от характера изменения входного сигнала во времени. Связь между входным и выходным сигналами статического звена обычно описывается алгебраической функцией.
Динамическое звено преобразует входной сигнал в соответствии с операциями интегрирования и дифференцирования во времени. Значение выходного сигнала динамического звена зависит не только от текущего значения входного сигнала, но и от его предыдущих значений, т. е. характера изменения входного сигнала.
Динамические звенья описываются дифференциальными уравнениями.
1.1. Уравнения динамических звеньев.
Составление уравнения динамики каждого звена системы является предметом соответствующей конкретной области технических наук: электротехники, теплотехники, химии и т. п., к которым и следует каждый раз обращаться.
Допустим, что в результате составления уравнения динамики какого-нибудь конкретного звена получилось следующее линейное дифференциальное уравнение:
An+an-1+…+a1+a0y(t) = Bm+bm-1+…+b1+b0x(t).
Решение дифференциальных уравнений значительно упрощается при использовании операционного преобразования Лапласа. При этом каждой временной функции X(t) или Y(T) соответствует функция X(p) или Y(P) комплексной переменной Р=A±jW (где P — оператор преобразования Лапласа).
Преобразование Лапласа выполняется в соответствии с формулой:
F(p)= ,
,
Где F(t) — оригинал функции; F(p) — изображение функции по Лапласу.
Переход от оригинала к изображению называется прямым преобразовании Лапласа и имеет символическую запись:
F(p)=L![]() .
.
Переход от изображения к оригиналу называется обратным преобразованием Лапласа и имеет символическую запись:
F(t)=![]() .
.
На практике прямое и обратное преобразования осуществляются по таблицам изображений типовых функций.
Передаточная функция звена.
Применив преобразование Лапласа к дифференциальному уравнению звена
An+an-1+…+a1+a0y(t) = Bm+bm-1+…+b1+b0x(t),
Получим
AnpnY(p)+an-1pn-1Y(p)+…+a1pY(p)+a0Y(p) = bmpmX(p)+bm-1pm-1X(p)+…+b1pX(p)+b0X(p).
Если вынести общие множители Y(p) И X(p), имеем:
Y(p)(anpn+an-1pn-1+…+a1p+a0)=X(p)(bmpm+bm-1pm-1+…+b1p+b0).
Передаточной функцией звена W(р) называется отношение изображений Лапласа выходной и входной величин звена при нулевых начальных условиях т. е.:
W(р)=; Или W(р)=.
Между дифференциальными уравнениями и передаточными функциями существует однозначная связь. Сравнивая последнее выражение с дифференциальным уравнением звена, видим, что формально передаточную функцию звена можно составлять как отношение операторных многочленов правой и левой частей уравнения звена. И наоборот, зная передаточную функцию, легко написать его уравнение, имея в виду что числитель передаточной функции соответствует правой части уравнения, а знаменатель передаточной функции — левой части уравнения.
В теории автоматического регулирования принято приводить уравнение звена к стандартному виду, когда свободный член равен единице:
W(р)=×=K×,
Где через An(p) и Bm(p) обозначены многочлены относительно Р с коэффициентами 1 в младших членах, причем степень Bm(p), как правило, ниже степени An(p), т. е. M<n;
K= – коэффициент усиления звена.
Пример 1
Пусть звено описывается дифференциальным уравнением
T2+T1+y(t)=kx(t).
В операторной форме уравнение имеет вид
Y(p)(T2p2+T1p+1)=kX(p).
Откуда передаточная функция звена
W(p)==.
Пример 2
Решим обратную задачу — найдем по передаточной функции дифференциальное уравнение.
Пусть передаточная функция имеет вид:
W(p)==,
Откуда
Y(p)(Tp+1)=kX(p);
TpY(p)+Y(p)=kX(p).
Учитывая, что Pº (формальное операционное соответствие), получим:
T+y(t)=kх(t).
Характеристическое уравнение звена
Многочлен в знаменателе передаточной функции звена An(p) называют характеристическим полиномом.
Характеристическое уравнение звена имеет вид:
An(p)=0, Или Anpn+An-1Pn-1+…+A1P+1=0,
Так что корни Pi характеристического уравнения звена являются полюсами его передаточной функции.
Виды типовых воздействий в САУ.
При анализе работы систем автоматического регулирования и их отдельных элементов в качестве типовых выбирают одно из следующих возмущений.
Импульсное возмущение — возмущение, полученное как последовательность двух одинаковых по величине, но противоположных по знаку ступенчатых возмущений, сдвинутых во времени на величину, обратную величине их интенсивности (рис.3б). Особое значение имеет единичная импульсная функция или дельта-функция, обозначаемая D(t).
Дельта-функция обладает следующими свойствами:
d(t)= ,
,  .
.
Первое свойство означает, что дельта-функция существует лишь в момент времени T=0. Второе свойство означает, что, несмотря на пренебрежимо малую длительность функции, площадь, ограниченная ею, имеет конечное значение, равное единице. Единичная импульсная функция является производной от единичного скачка, т. е.:
D(t)=.
Ступенчатое возмущение — мгновенное изменение воздействия на постоянную величину, чаще всего равную единице (рис.3а). Физическая система испытывает толчок. Аналитически ступенчатое возмущение записывается в виде
F(t)= .
.
 Г
Г  Д
Д
А — ступенчатое; б — импульсное; в — гармоническое; г — скачок скорости; д — скачок ускорения
Рис.3. Типовые возмущения систем.
Периодическое возмущение — возмущение, изменяющееся периодически во времени. Оно удобно для исследования автоматических систем, работающих в режиме незатухающих колебаний. Наиболее простым периодическим возмущением является гармоническое колебание единичной амплитуды (рис. 3в).
Скачок скорости или скачок ускорения — возмущения, являющиеся стандартными для следящих систем, которые работают в режиме постоянной скорости X(t)=at (рис.3г) или постоянного ускорения X(t)=bt2 (рис.3д).
Переходная функция звена.
Переходной функцией H(t) называется реакция звена на типовое воздействие (рис.4), т. е. переходный процесс на выходе Y(t). Как правило, под переходной функцией считают реакцию на ступенчатое воздействие.

Рис.4. Входное ступенчатое воздействие x(t)=1(t) и ему соответствующая переходная функция звена h(t).
Переходная функция может быть определена экспериментально или вычислена теоретически.
Например, если на вход подается единичный скачок 1(t), то его изображение по Лапласу X(р)=L{1(t)}=. Зная передаточную функцию звена, W(p)=, находим изображение выходной величины как:
Y(p)=W(p)×=×.
Переходя к оригиналу, получим
h(t)= =
= .
.
Переход от изображения к оригиналу может быть осуществлен по таблице операционных соответствий или по теореме разложения
H(t)=+ ,
,
Где Pi — корни характеристического уравнения Anpn+An-1pn-1+…+A1p+1=0;
A'(pi) – производная A'(p)= при P=pi.
Для примера найдем переходную характеристику звена c передаточной функцией
W(p)=.
Характеристическое уравнение звена
Тp+1=0.
Корень P1=-. Тогда по формуле обратного преобразования
H(t)=k .
.
Установившееся значение реакции на выходе элемента может быть легко определено из выражения
![]() .
.
Для переходной характеристики Hуст=![]() .
.
Частотные характеристики звена.
Частотными характеристиками называют формулы и графики, характеризующие реакцию звена на синусоидальное входное воздействие в установившемся режиме, то есть вынужденные синусоидальные колебания звена.
Если на вход звена подается единичный синусоидальный сигнал (как показано на рис.5)
X(t)=sinWT,
То на выходе будет (в установившемся режиме)
Y(t)=A×Sin(WT+Y),
Где A — амплитуда (точнее, усиление амплитуды), а Y — фаза (точнее, сдвиг по фазе).
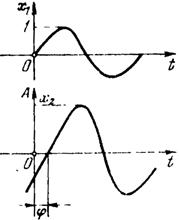
Рис.5. Реакция устойчивого звена на синусоидальное воздействие.
Амплитудно-частотная характеристика (АЧХ) A(W) Есть зависимость отношения амплитуды колебаний на выходе звена к амплитуде на входе от частоты входного сигнала:
A(W)=,
Где Aвых(W), Aвх — соответственно амплитуды выходного и входного сигналов;
W — частота входного сигнала.
Фазо-частотная характеристика (ФЧХ) Y(W) Есть зависимость разности фаз выходного и входного сигналов от частоты входного сигнала
Y(W)=Y2-Y1,
Где Y2, Y1 — начальные фазы соответственно выходного и входного сигналов.
Амплитудная и фазовая частотные характеристик изображаются графически (рис.6).
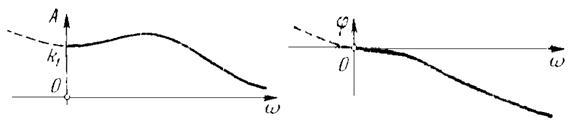
Рисунок 6 — Графики амплитудной и фазовой частотных характеристик.
Амплитудно-фазовая характеристика (АФХ) есть отношение выходного и входного гармонического сигналов, записанных в комплексной форме, при изменении частоты входного сигнала от нуля до бесконечности.
АФХ изображается на комплексной плоскости и для каждой частоты представляет собой вектор длиной A(W), идущий под углом Y(W) к вещественной положительной полуоси. Годограф, соединяющий концы векторов, построенных для всех частот от нуля и до бесконечности, и будет являться АФХ.
Амплитудно-фазовая частотная характеристика АФЧХ (ее еще называют комплексной передаточной функцией) звена получается из передаточной функции W(p) подстановкой P=jW W(jW)=W(р)ïр=jW.
W(jW)=k.
Амплитудно-фазовая характеристика представляет собой комплексное число и может быть представлена в виде
W(jW)=A(W)![]() =U(W)+jV(W),
=U(W)+jV(W),
Где A(W)= – амплитудно-частотная характеристика;
U(W) — вещественная частотная характеристика;
V(W) — мнимая частотная характеристика.
Если передаточная функция представлена в виде отношения полиномов числителя и знаменателя, то модуль амплитудно-фазовой характеристики удобно находить как отношение модулей числителя и знаменателя:
A(W)=k,
А фазу — как разность аргументов числителя и знаменателя
Y(W)=Arg[Bm(JW)]-Arg[АN(JW)].
Графически амплитудно-фазовая частотная характеристика изображается на комплексной плоскости (рисунок 7) в координатах (U, V), как годограф функции W(jW). Можно строить амплитудно-фазовую частотную характеристику, выделив в выражении W(jW) вещественную и мнимую части. При этом частоту W изменяют от 0 до ¥ (сплошная кривая на рис.7) или же от —¥ до +¥, когда добавляется еще симметричная к ней пунктирная кривая.
Рис.7. АФЧХ звена.